Table of contents
| Read No. | Name of chapter |
|---|---|
| 14 | Trees |
Trees
Common Terminology
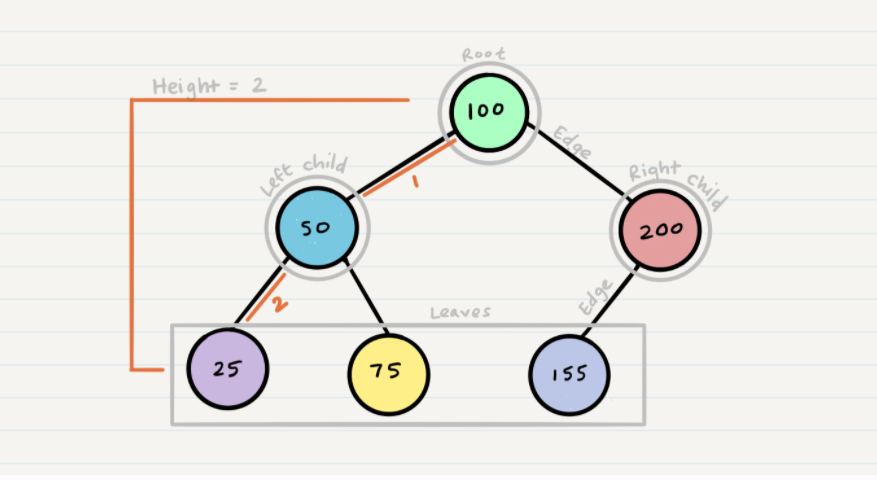
- Node - A node is the individual item/data that makes up the data structure
- Root - The root is the first/top Node in the tree
- Left Child - The node that is positioned to the left of a root or node
- Right Child - The node that is positioned to the right of a root or node
- Edge - The edge in a tree is the link between a parent and child node
- Leaf - A leaf is a node that does not contain any children
- Height - The height of a tree is determined by the number of edges from the root to the bottommost node
Traversals
An important aspect of trees is how to traverse them. Traversing a tree allows us to search for a node, print out the contents of a tree, and much more! There are two categories of traversals when it comes to trees:
- Depth First
- Breadth First
Depth First
Depth first traversal is where we prioritize going through the depth (height) of the tree first. There are multiple ways to carry out depth first traversal, and each method changes the order in which we search/print the root. Here are three methods for depth first traversal:
- Pre-order: root » left » right
- In-order: left » root » right
- Post-order: left » right » root
The most common way to traverse through a tree is to use recursion. With these traversals, we rely on the call stack to navigate back up the tree when we have reached the end of a sub-path.
Pre-order
ALGORITHM preOrder(root)
OUTPUT <-- root.value
if root.left is not NULL
preOrder(root.left)
if root.right is not NULL
preOrder(root.right)
In-order
ALGORITHM preOrder(root)
if root.left is not NULL
preOrder(root.left)
OUTPUT <-- root.value
if root.right is not NULL
preOrder(root.right)
Post-order
ALGORITHM preOrder(root)
if root.left is not NULL
preOrder(root.left)
if root.right is not NULL
preOrder(root.right)
OUTPUT <-- root.value
Breadth First
Breadth first traversal iterates through the tree by going through each level of the tree node-by-node.
Traditionally, breadth first traversal uses a queue (instead of the call stack via recursion) to traverse the width/breadth of the tree.
ALGORITHM breadthFirst(root)
// INPUT <-- root node
// OUTPUT <-- front node of queue to console
Queue breadth <-- new Queue()
breadth.enqueue(root)
while breadth.peek()
node front = breadth.dequeue()
OUTPUT <-- front.value
if front.left is not NULL
breadth.enqueue(front.left)
if front.right is not NULL
breadth.enqueue(front.right)
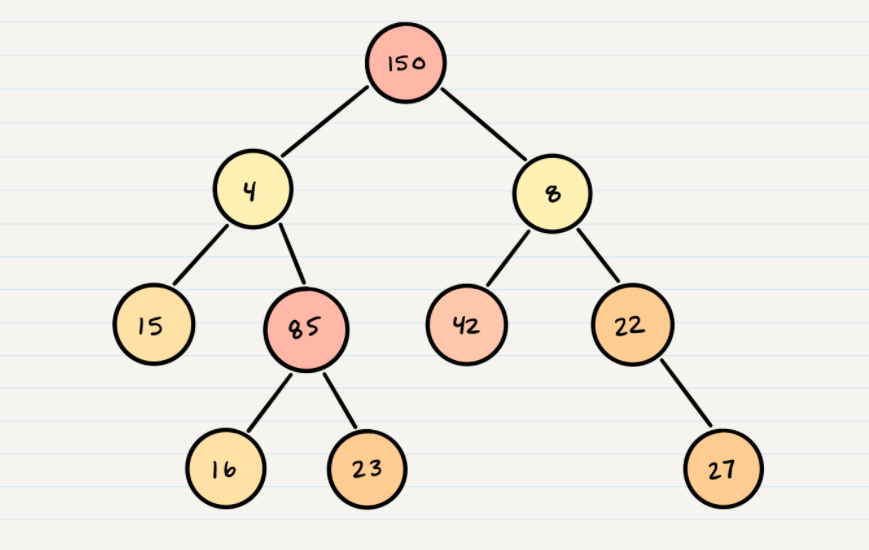
Binary Trees
Trees can have any number of children per node, but Binary Trees restrict the number of children to two (hence our left and right children).
There is no specific sorting order for a binary tree. Nodes can be added into a binary tree wherever space allows. Here is what a binary tree looks like: